






































































-247x247.jpg)

































-247x247.jpg)











































































































































































































-247x247.jpg)






In questo articolo vediamo come funziona il Mission Pad, una delle nuove caratteristiche dell’ultimo drone realizzato da Ryze, Powered by DJI e Intel, il Tello EDU, disponibile nei nostri store di Roma e Milano.
Il Mission Pad viene impiegato insieme al Tello EDU quando si utilizza la SDK 2.0 per la programmazione. Il Tello EDU tramite la sua fotocamera rileva l’identificativo, ID, del Mission Pad ed esegue dei comandi.
In ogni confezione di Tello EDU troviamo 4 Mission Pad a doppia facciata, con disegnati in ciascuna facciata un unico ID, un Razzo e dei Pianeti.
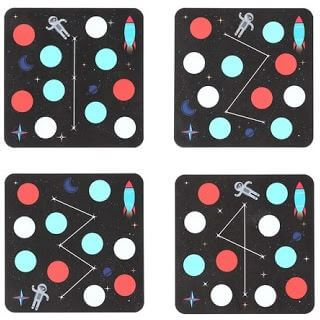
Il Razzo rappresenta la direzione in avanti dell’asse delle X
Il numero identificativo ID può variare da 1 a 8 ed è presente su ciascuna facciata del Mission Pad.
I Pianeti rappresentano diverse figure che indicano l’ID e le coordinate che il Tello EDU può riconoscere.
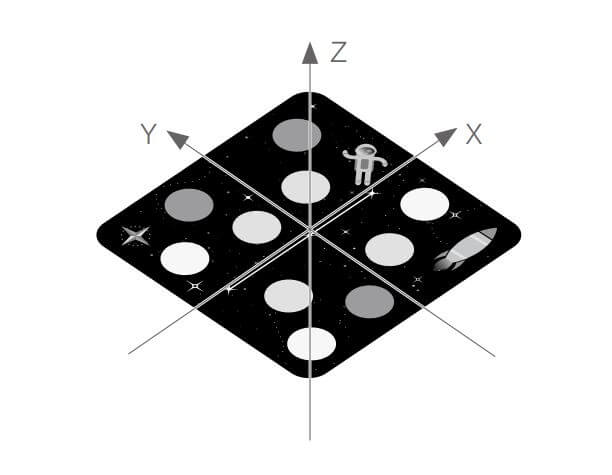
I disegni di ciascun Mission Pad rappresentano delle coordinate in 3D con origine nel centro del Mission Pad il quale rappresenta il piano xy.
Posizionare il Mission Pad su una superficie piana e orientare il Razzo come si desidera.
Abilitare il riconoscimento nel Tello EDU del Mission Pad tramite il comando mon della SDK 2.0 e posizionare il drone al centro del Mission Pad.
Il comando moff disabilita il riconoscimento del Mission Pad.
Il comando mdirection x, dove x può valere 0,1 o 2, abilita il rilevamento in basso (0), il rilevamento in avanti (1) o il rilevamento in avanti e in basso contemporaneamente (2). Notare che la frequenza di rilevamento è di 20 Hz nei primi due casi e di 10 Hz nel terzo caso.
Adesso vediamo i comandi di movimento.
Go x y z speed mid è il commando che dice al Tello EDU di volare a velocità speed verso le coordinate x,y,z del Mission Pad il cui ID è mid.
Per esempio go 100 100 100 60 m1, dice al Tello EDU di volare a 60 cm/s nelle coordinate 100,100,100 del Mission Pad il cui ID è 1.
Notare che i valori ammessi per x,y,z devono essere compresi tra -500 e 500 e speed da 10 a 100.
Curve x1 y1 z1 x2 y2 z2 speed mid è il commando che dice al Tello EDU di volare in curva per i due punti di coordinate x1,y1,z1 e x2,y2,z2 con velocità speed del Mission Pad con ID mid.
Per esempio curve 100 100 100 500 500 500 40 m2, dice al Tello EDU di volare a 40 cm/s in una curva per le coordinate 100,100,100 e poi 500,500,500
La curva è determinata da tre punti, la posizione attuale del drone, il punto 100,100,100 e il punto 500,500,500. Notare che se i tre punti sono allineati oppure non creano una curva di raggio compreso tra 0,5 e 10 metri, il drone rimane fermo e restituisce il messaggio Error.
Notare che x,y,z devono essere compresi tra -500 e 500 e speed tra 10 e 60.
Jump x y z speed yaw mid1 mid2, è il commando che dice al Tello EDU di volare alle coordinate x,y,z con velocità speed, poi riconoscere il Mission Pad mid2 e ruotare di yaw.
Per esempio jump 100 100 100 40 100 m1 m2, dice al Tello EDU di volare a 40 cm/s fino alle coordinate 100,100,100 del Mission Pad con ID 1, fermarsi, poi riconoscere il Mission Pad con ID 2 e ruotare di 100°.
Portata del rilevamento
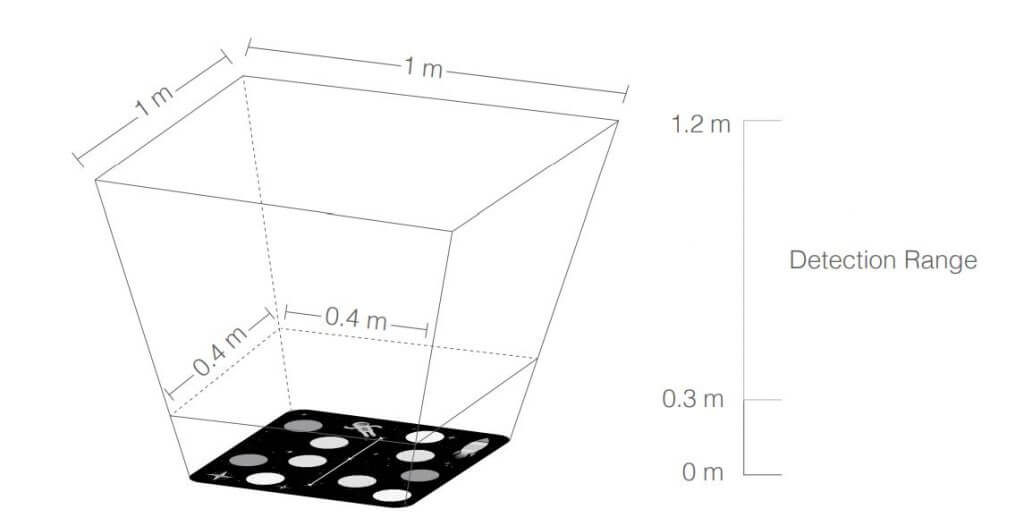
Altezza: da 0,3 a 1,2 metri
A 0,3 metri di altezza rileva fino a 0,4 x 0,4 metri
A 1,2 metri di altezza rileva fino a 1 x 1 metro.