






































































-247x247.jpg)

































-247x247.jpg)











































































































































































































-247x247.jpg)






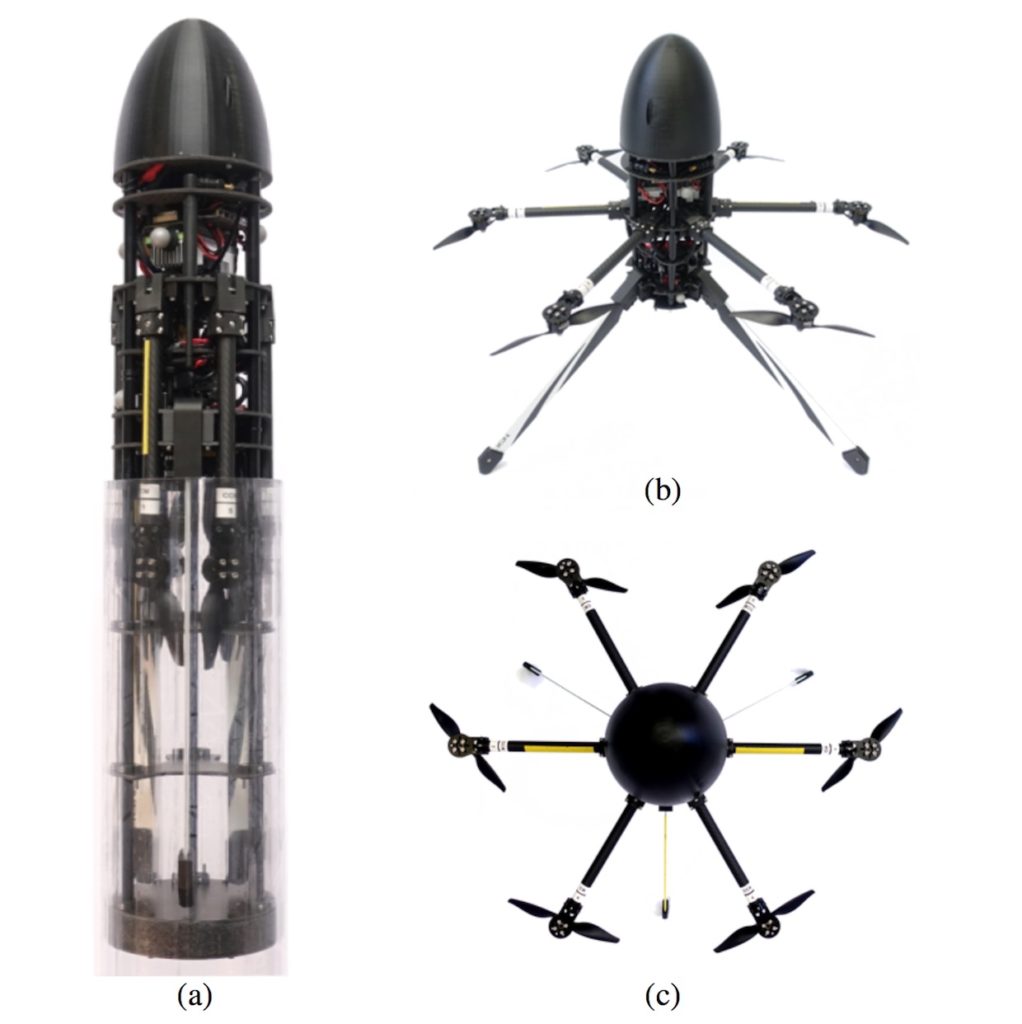
L’anno scorso all’IROS, Caltech e il Jet Propulsion Lab della NASA hanno presentato un prototipo per un quadrirotore lanciato balisticamente: una volta piegato in una sorta di forma di pallone da calcio con alette, il drone viene inserito in un tubo e quindi sparato verso l’alto con un’esplosione di CO2 compressa, a quel punto si dispiega, si stabilizza e poi vola via. Sono passati circa sei mesi e il prototipo è stato ampliato sia in termini di dimensioni che di capacità, ora con una mezza dozzina di rotori e piena autonomia a bordo che può (a malapena) entrare in un tubo da 6 pollici.
SQUID (Calamaro in italiano) è l’acronimo di Streamlined Quick Unfolding Investigation Drone. L’originale SQUID da 3 pollici (7,6 centimetri) è stato retrocesso a “micro-SQUID”, e il nuovo SQUID è questa versione molto più robusta da 6 pollici. Generalmente, i droni lanciati dal tubo sono unici in quanto rimuovono il requisito per il tipo di condizioni di decollo specifiche che la maggior parte dei droni si aspetta: stazionari e al suolo e non vicino a nulla che si opponga a essere tagliato a pezzi. L’idea generale è che puoi lanciare uno SQUID istantaneamente e praticamente da qualsiasi luogo.
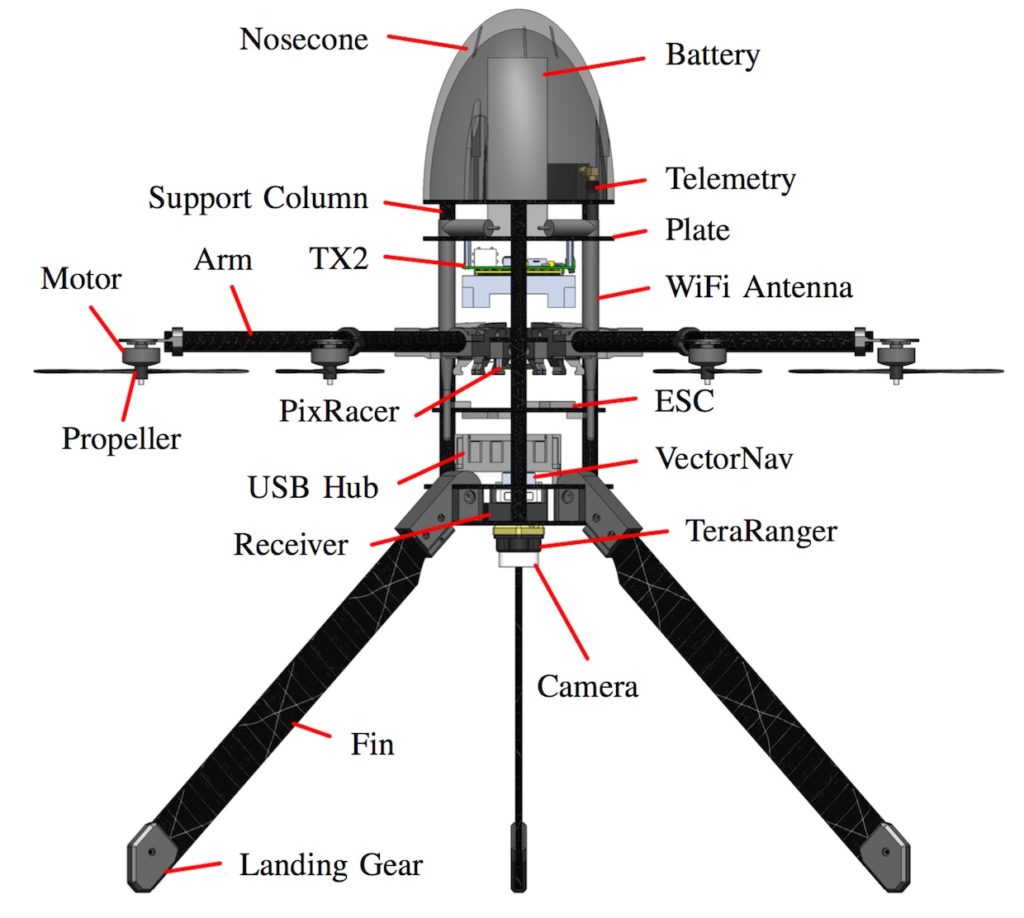
Il punto del micro-SQUID era elaborare i principi aerodinamici e strutturali generali per un multirotore lanciato balisticamente, piuttosto che sviluppare qualcosa capace di una missione. Capacità di una missione significa, tra le altre cose, autonomia a bordo senza fare affidamento sul GPS, che a sua volta richiede un rilevamento e un calcolo che siano abbastanza pesanti e affamati di energia da necessitare del potenziamento dell’intero veicolo. Il nuovo SQUID da 6 pollici presenta alcuni importanti aggiornamenti, tra cui una riprogettazione aerodinamica per una migliore stabilizzazione passiva durante il lancio e il volo balistico attraverso l’uso di pinne dispiegabili. L’hardware di autonomia è costituito da una fotocamera (FLIR Chameleon3), un telemetro (TeraRanger Evo 60m), IMU/barometro (VectorNav VN-100) e computer di bordo (NVIDIA Jetson TX2).
I cambiamenti strutturali e aerodinamici sono necessari perché SQUID trascorre la prima fase del suo volo non volando affatto, ma piuttosto seguendo solo la traiettoria balistica su cui si trova una volta che viene lanciato. Se va solo verso l’alto, non è poi così male, ma le cose iniziano a complicarsi se il drone viene lanciato ad angolo o da un veicolo in movimento. Avere un baricentro alto aiuta (la batteria risiede nel cono di prua), e le alette dispiegabili svolgono il doppio compito mantenendo il drone puntato passivamente nel flusso d’aria mentre funge anche da carrello di atterraggio. Senza le pinne, inizierebbe a ruotare dopo aver lasciato il tubo, e poi buona servirebbe una fortuna cercando di controllarlo. Affinché le pinne siano sia pieghevoli che abbastanza stabili da permettere a SQUID di atterrare, hanno un meccanismo di aggancio che aiuta a mantenerle rigide.
Quell’involucro duro da 6 pollici di diametro di SQUID si è rivelato una vera sfida. La maggior parte dei droni ha vincoli di potenza o massa, ma SQUID è invece vincolato dal volume. Non solo devi stipare tutte le batterie e i computer in quello spazio, ma devi assicurarti che i sensori abbiano il campo visivo di cui hanno bisogno, tenendo presente che nello stato piegato tutte le braccia e le gambe devono condividere lo stesso spazio di tutto il resto. Si scopre che SQUID è molto ben ottimizzato, tuttavia, pesa solo 3,3 chilogrammi, solo circa 0,3 kg in più di quello che i robotisti stimano come peso per un drone convenzionale non pieghevole e non ottimizzato con capacità simili.
Allora perché preoccuparsi di tutto questo fastidio per l’intera faccenda del lancio del tubo? Ci sono un sacco di motivi per cui vale la pena:
– È veloce da avviare. Non è necessario disfare le valigie o sistemare o trovare un punto piatto o dire a tutti di stare indietro, basta premere un pulsante e bam, SQUID è fuori dal tubo a 12 metri al secondo ed è in volo.
– È sicuro da avviare. A meno che qualcuno non sia seduto direttamente sopra il tubo di lancio (nel qual caso potresti sostenere che meritano ciò che stanno per sperimentare), il lancio cancella rapidamente il livello umano prima di utilizzare qualsiasi pezzo pericolosamente tagliente.
– Può avviarsi durante lo spostamento. Questo è importante: il lancio balistico e l’auto-stabilizzazione significano che SQUID può essere lanciato in modo affidabile da un veicolo in movimento che si muove fino a 80 chilometri all’ora, come un camion o una barca, aumentando significativamente la sua utilità, specialmente in scenari di emergenza.
– A volte può essere lanciato attraverso le cose. I ricercatori sottolineano che nella sua forma più aerodinamica (senza alette o rotori schierati), SQUID potrebbe potenzialmente essere lanciato direttamente dalla sommità di un albero o linee elettriche, se necessario, che è una capacità totalmente unica per un aeromobile.
Come ci si potrebbe aspettare da un drone di Caltech e JPL, il piano a lungo termine è quello di iniziare a pensare allo spiegamento aereo, come il lancio di piccoli droni da aerei più grandi. Ciò potrebbe eventualmente fornire un modo per il dispiegamento di piccoli droni da veicoli spaziali su Marte durante l’ingresso atmosferico, riducendo potenzialmente la necessità di un grande modulo di atterraggio. In effetti, è comune che gli aeroshell che trasportano i moduli di atterraggio alle superfici planetarie si riequilibrino durante l’ingresso atmosferico facendo cadere un gruppo (come 150 kg) di peso per regolare il loro angolo di attacco. Quei pesi sono pezzi di tungsteno completamente inutili, ma se fosse possibile sganciare alcuni droni dispiegabili a mezz’aria, potresti potenzialmente fare un bel po’ di scienza in più senza aggiungere massa extra o rischi a una missione esistente.