






































































-247x247.jpg)

































-247x247.jpg)









































































































































































































-247x247.jpg)






I droni DJI documentano le popolazioni di pinguini nell’ambiente più estremo del pianeta
Nel 2019, un professore di Stanford e uno studente hanno caricato un’auto in California con pinguini impagliati.
Sono andati a Santa Clara, in un’area dove gli hobbisti pilotano droni e aerei radiocomandati. Hanno tirato fuori i pinguini e li hanno sparpagliati per terra. Quindi hanno pilotato i droni, utilizzando un software speciale per creare percorsi per fotografare gli uccelli impagliati.
“Sono sicuro che questi hobbisti pensavano che fossimo matti”, ride Mac Schwager, assistente professore di aeronautica e astronautica.
Potrebbe sembrare insolito, ma Schwager era coinvolto in un compito serio. Alcune delle lezioni apprese che la soleggiata giornata della California alla fine sarebbe stata utilizzata con centinaia di migliaia di veri pinguini, molto vicini al polo sud. In particolare, i droni presto voleranno sopra una zona arida di roccia e ghiaccio conosciuta come Cape Crozier Adélie Penguin Rookery, dove centinaia di migliaia di pinguini si riuniscono ogni anno per procreare.
Anche lì, proprio come un orologio, un piccolo gruppo di ricerca viene a documentare e conoscere quella popolazione. È un lavoro affascinante. Ma è difficile immaginare una parte più remota del pianeta: sterile, abbandonata, lontana.
“Non esiste davvero un posto simile sulla terra”, afferma Kunal Shah, dottorando presso il laboratorio Stanford Multi-Robot Systems o MSL.
“La maggior parte della zona è incontaminata dagli umani, molto selvaggia.”
Dai un’occhiata:

Non c’è elettricità, né acqua corrente: pochissimi dei comfort su cui la maggior parte di noi fa affidamento nella vita quotidiana. Ma c’è una scienza importante da portare avanti: studiare quei pinguini. In particolare, cercando di individuare con precisione quante di queste creature nidificano qui durante l’estate antartica – all’incirca da ottobre a febbraio – e se potrebbe esserci una correlazione tra le fluttuazioni della popolazione e la contrazione dei livelli stagionali del ghiaccio marino ghiacciato.
È un lavoro enorme. E i droni stanno ora giocando un ruolo molto importante nella ricerca. Ma non è stato sempre così.
Il vecchio metodo
Tradizionalmente, gli scienziati avevano solo un’opzione: taggare manualmente i singoli pinguini – diciamo circa 1.000 dell’intera colonia – e poi trovare quanti più pinguini possibile ogni anno successivo. Sulla base dei pinguini avvistati e della densità dei nidi e dell’area della colonia complessiva, potresti trarre alcune conclusioni basate sui dati sul numero totale della popolazione.
È stato perfetto? No. Ma era la migliore opzione disponibile. Gli elicotteri sono troppo costosi, rumorosi e invadenti per i rilievi aerei. Inoltre, dovrebbero essere fatti volare al di sotto delle altitudini legali per acquisire la risoluzione necessaria affinché le immagini siano davvero preziose.
Quindi quello era lo standard: tagging e conteggio noiosi e dispendiosi in termini di tempo.
Almeno così è stato fino a una conversazione fortuita tra due sconosciuti a un matrimonio in California.
Quali sono le probabilità?
Nel giugno 2016, c’è stato un incontro casuale a un matrimonio. La biologa Annie Schmidt, la cui ricerca presso Point Blue Conservation Science si concentra sull’ecologia dei pinguini, ha incontrato Mac Schwager. Mac è un assistente professore di aeronautica e astronautica a Stanford. Parte del suo lavoro prevede l’acquisizione di dati tramite drone.
Presto Annie stava descrivendo le sfide della metodologia esistente per quel lavoro sul campo al Polo Sud. Mac ha parlato dei potenziali vantaggi dell’utilizzo dei droni: potrebbero fornire dati non invasivi e di alta qualità a un costo relativamente economico. Con il giusto approccio, i droni potrebbero non solo risparmiare agli scienziati la fatica di trovare e contare i pinguini etichettati, ma potrebbero fornire un eccellente set di dati in una frazione del tempo con un briciolo di seccatura.
La coppia ha scritto una proposta di sovvenzione; la National Science Foundation ha accettato di finanziarlo.
Entra DJI
La concessione è stata riscritta nel 2017, prima che DJI annunciasse i suoi droni Inspire 2 e M200. A quel tempo, il prodotto più adatto era il Matrice 100. Il team impiegò cinque di queste macchine.

(Credito immagine: Parker Levinson / Point Blue)
Ma questo è solo l’inizio di questa storia straordinaria. Perché presto il team avrebbe lavorato con il dottorando Kunal Shah. In poco tempo, Kunal avrebbe modificato il codice, cercando di ottimizzare un algoritmo per l’attività. L’obiettivo? Per garantire che più droni, volando contemporaneamente ma su percorsi diversi, possano catturare l’intera popolazione di pinguini nella colonia nel modo più efficiente possibile.
“Fondamentalmente si tratta di sfruttare al meglio il tempo di volo limitato”, afferma Shah.
Perché la preoccupazione per la velocità e l’efficienza?
Le finestre che forniscono condizioni meteorologiche adatte per i voli con i droni sono spesso brevi. Le basse temperature possono influire sulla durata della batteria. Le batterie vengono caricate tramite l’energia solare, che richiede tempo. I ricercatori volevano garantire il minimo disturbo per i pinguini. E – fattore importante qui – i pinguini sono spesso in movimento. Più velocemente le foto possono essere raccolte, più è probabile che i ricercatori non contino gli stessi pinguini più di una volta.
Bene, è semplice. Vola su una griglia, giusto?
No. Affatto.
Un algoritmo straordinario …
Facciamo finta che tu abbia lasciato cadere qualcosa di prezioso su un prato. Inoltre, immagina che ci sia un solo punto di accesso dentro o fuori dal cortile. Entrando, il tuo istinto sarebbe quello di cercare in uno schema a griglia, camminando attentamente per file per assicurarti di avere la possibilità di vedere tutto sul terreno.
La maggior parte di noi – e anche alcuni software per droni – applicherebbero la stessa logica ai voli di fotogrammetria. Saremmo inclini a volare su una griglia ordinata, fermandoci e scattando foto a ogni punto intermedio. E, ovviamente, ognuno di questi waypoint sarebbe su una riga. Prendi una riga di immagini, poi un’altra, poi un’altra … finché non hai finito. Pensa a come falciare un prato nel cielo.
Che tu ci creda o no, questo NON è il modo più efficiente per coprire quel territorio dall’alto. E, una volta che hai preso in considerazione più droni nell’equazione, non è sicuramente il metodo migliore.
È qui che entra in gioco Kunal Shah. Da cinque anni lavora con la pianificazione robotica dei percorsi, cercando modi per calcolare i percorsi più efficienti che le macchine con determinate attività possono seguire. È anche un pilota di droni.
Mac Schwager ha chiesto se era interessato a partecipare al progetto. Shah ricorda la conversazione:
“Ehi, vuoi andare in Antartide? Hai una settimana per pensarci.”
Come probabilmente hai intuito, Shah ha detto “Sì”.
Come funziona?
Immagina una mappa di quella colonia: un’area aspra con molte centinaia di migliaia di pinguini. Ora immagina di aver determinato l’altitudine ottimale per scattare fotografie e quanto dovrebbe essere vicina ciascuna foto per una sufficiente sovrapposizione dei punti. Ti ritroveresti con una serie di waypoint che sembra una griglia sovrapposta.
L’algoritmo di Shah, tuttavia, guarda a questo problema in un modo diverso. Calcola le traiettorie di volo più efficienti per ciascuno dei droni. Assicura che venga scattata una foto a ogni waypoint, ma che vi sia un minimo backtracking sull’intero percorso di volo.
“L’idea alla base di questo è che volevamo ridurre al minimo la quantità di backtracking che il drone sta facendo. Se osservi molti dei modi classici per risolvere questo problema, hai un’area e stai fondamentalmente volando avanti e indietro su questo percorso. Ma spesso ciò che accade è che il punto di partenza e il punto di arrivo sono geograficamente molto lontani”, spiega Kunal.
“E questo non è un grosso problema se il percorso è un paio di acri di terreno agricolo o il soggiorno per il tuo aspirapolvere robotico: il percorso di ritorno potrebbe richiedere solo un paio di secondi per attraversarlo. Ma in una vasta area come questa il percorso di ritorno dall’inizio alla fine potrebbe essere dell’ordine di un chilometro. E questa è una durata della batteria sprecata, giusto? Se pianificassi meglio, potresti sfruttare la durata della batteria e, idealmente, fermarti da dove hai iniziato. “
Questo non è qualcosa che potresti calcolare da solo. Lontano da esso.
“Man mano che aggiungi più punti, la complessità computazionale aumenta vertiginosamente”, afferma Mac Schwager di Stanford.
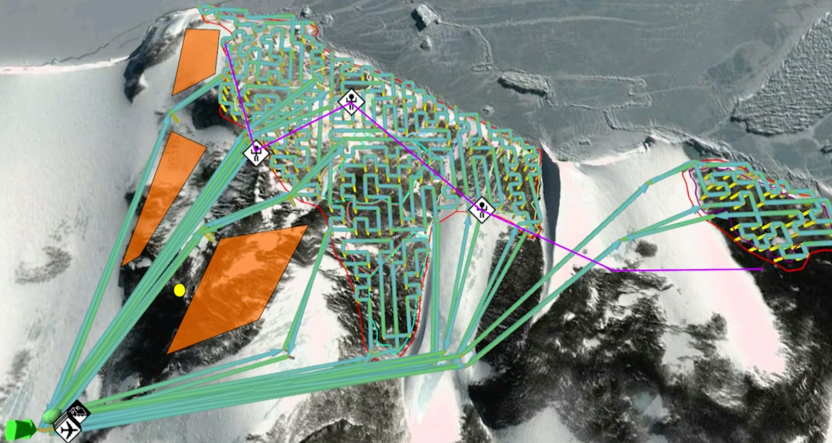
E i percorsi prodotti? Dai un’occhiata:
L’algoritmo tiene conto del numero di foto richieste, dell’area, del tempo di volo e del numero di droni coinvolti (avevano fino a quattro M100 in aria contemporaneamente). Quindi traccia un percorso attraverso quei waypoint con un inizio e un punto finale comuni. Il risultato? Una serie intricata di zig e zag che assicura che tutte le foto vengano scattate, senza alcuna ripetizione, massimizzando la durata della batteria.
“Tende a produrre modelli che sembrano frattali, eccentrici e contorti”, afferma Mac Schwager. “Non esiste un modello comune di tosaerba avanti e indietro, ma quella stravaganza è preziosa.”
Meglio di un singolo drone
L’anno prima che Kunal partecipasse al progetto (era al Polo Sud dalla fine di novembre 2019 fino all’inizio di febbraio 2020), il team ha provato a far volare un Phantom 4 Professional in uno schema a griglia. Il successo nell’utilizzo di quel percorso del tosaerba era limitato. Le batterie dovevano essere sostituite durante la missione. E, poiché il volo complessivo è durato più a lungo, c’era il problema dei pinguini che si spostavano per distanze potenzialmente significative, presentandosi in più di una foto e contati due volte (o più).
Con un pilota e un drone, questo lavoro ha richiesto più di due giorni. Con più M100 e l’algoritmo, sono necessarie circa tre ore. Quindi c’era un’enorme differenza di efficienza.
Tantissimi dati
Con gli M100 che volano a 50 metri, la risoluzione dell’immagine risultante era di circa 1,5 cm/pixel. Con una sovrapposizione del 60%, l’area richiedeva tra 2.000 e 3.000 foto, risultando in singole immagini aggregate fino a 10 gigabyte.
“Quelle foto sono state caricate tutte su un software di stitching che crea un gigantesco fotomosaico”, afferma Shah. “E poi quell’immagine viene inviata a una pipeline di machine learning che classificherà ciò che è un pinguino e conterà automaticamente i pinguini in quell’enorme immagine.”
Come si sono comportati gli M100?
Nonostante non avessero le batterie riscaldate fornite con i modelli successivi, gli M100 erano all’altezza del compito. Il team ha tenuto le batterie al caldo fino a poco prima delle missioni.
“Sono macchine ben costruite”, dice Shah. “E sono rimasto piacevolmente sorpreso.”
Un altro gruppo di ricerca è tornato per l’estate antartica 2020-2021. Shah non si è unito a loro, almeno in parte a causa del COVID-19.
“Dovevo assolutamente tornare quest’anno, ma il mondo è esploso”, spiega. “Potrei tornare l’anno prossimo (2021-2022); Vorrei continuare a lavorare con questo gruppo di persone”.
Inoltre, ci sono sempre i pinguini.
“Non sono abituati agli umani, quindi sono piuttosto curiosi. È stato un bel privilegio andare a osservarli”, dice Shah.

“Sono ancora animali selvatici, ma sono curiosi e verranno su e cammineranno con te.”
Questo almeno in parte perché, a differenza dei droni, i pinguini non possono volare.