









































































-247x247.jpg)






































-247x247.jpg)




































































































































































































—Front-View-247x247.jpg)
—illustration-1-247x247.jpg)
—Top-View-247x247.jpg)







































-247x247.jpg)






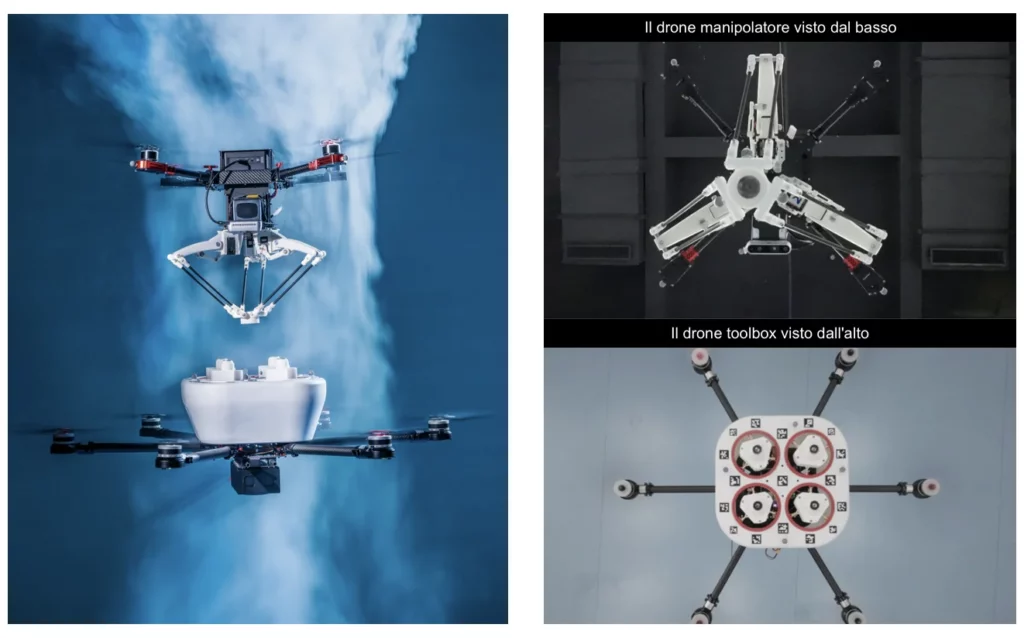
Lo scambio di attrezzi fra droni durante il volo non è semplice come potrebbe sembrare, eppure una soluzione promettente emerge con FlyingToolbox. Si tratta di un sistema concepito da ricercatori della Westlake University in Cina, che rappresenta il primo caso al mondo di trasferimento in volo di strumenti tra veicoli aerei, superando una barriera tecnica che finora impediva manovre di questo tipo: la turbolenza creata dalle eliche (il cosiddetto downwash).
Quando un drone vola direttamente sopra un altro, l’aria spinta verso il basso dai rotori può arrivare a velocità superiori a 13 m/s, generando disturbi estremi e rendendo instabile il velivolo sottostante. Proprio per questo, fino ad ora, l’allineamento verticale di droni per operazioni delicate era considerato fuori portata. FlyingToolbox ribalta questa concezione.
Due droni per due ruoli
Il sistema prevede due tipologie di droni cooperanti: il primo agisce come “toolbox drone”, portando con sé vari accessori, il secondo come “manipulator drone”, dotato di braccio robotico che può agganciare o restituire attrezzi durante il volo. Il meccanismo richiama l’idea di un chirurgo che riceve gli strumenti da un’assistente durante un intervento. Ma anche, se volete un’immagine più romantica, quella dei trapezisti circensi che prevedono per i loro numeri un porteur (catcher) che afferra gli atleti, impegnati nelle loro acrobazie. Affinché l’assetto rimanga stabile, gli scienziati hanno integrato diverse tecnologie: predizione in tempo reale delle correnti d’aria, compensazione automatica, docking magnetico con sistemi elastici e visione artificiale (con codici QR) per l’allineamento con precisione sub–centimetrica anche in presenza di turbolenza.
Risultati sperimentali
Nelle prove sperimentali, il sistema ha consentito 20 agganci consecutivi senza errori, con una precisione media migliore di 0,80 ± 0,33 cm, un salto rispetto ai sistemi precedenti che avevano margini di deviazione di 6-8 cm. Il meccanismo prevede che il braccio del drone superiore si innesti in connettori magnetici flessibili sul drone inferiore, assorbendo le leggere imprecisioni durante l’unione.
Oltre a spingersi verso livelli di controllo mai visti, FlyingToolbox apre scenari per droni cooperativi in missioni rischiose — soccorsi, ispezioni di infrastrutture, interventi in ambienti pericolosi — evitando la presenza umana nei punti critici. Finora i test sono stati realizzati in ambienti controllati, ma i ricercatori stanno già lavorando a versioni adatte all’esterno e a bracci più flessibili capaci di maneggiare componenti complessi.
Possibile applicazione su droni DJI Matrice
Il FlyingToolbox potrebbe essere integrato nell’uso dei droni DJI Matrice (ad esempio il Matrice 400, 300 e 350). Questi droni sono già ampiamente usati in applicazioni industriali, ispezioni, mappature e ricerca in ambienti complessi, grazie alla loro stabilità, affidabilità e modularità.
Immaginate un Matrice dotato del ruolo di toolbox drone, carico di attrezzature come sensori, moduli di ricambio, batterie, strumenti diagnostici. Sopra di esso, un secondo Matrice modificato con braccio meccanico potrebbe agganciare quegli strumenti in volo, cambiare l’attrezzatura senza bisogno di un atterraggio, nel pieno rispetto delle dinamiche aeronautiche.
L’assetto robusto del Matrice e la possibilità di personalizzare nodi esistenti renderebbero plausibile adattare la tecnologia di docking magnetico, visione artificiale e compensazione del downwash anche su quella piattaforma. Questo tipo di cooperazione potrebbe estendere enormemente le capacità operative dei droni industriali, riducendo interruzioni e migliorando efficienza in scenari complessi.
Esempi di utilizzo dei droni DJI Matrice nei settori della sicurezza, soccorsi, monitoraggio:
- Droni: i primi a intervenire in caso di chiamata al 911 in Ohio. E in Italia…
- Disperso a Seravezza: elicottero e DJI Matrice 30 in un’operazione congiunta dei Vigili del Fuoco
- Droni DJI al servizio della pubblica sicurezza: l’esempio di El Paso in Texas
- DJI Matrice 400: il nuovo standard per i droni professionali
- DJI Matrice 4T: il drone ranger che salva i rinoceronti bianchi dall’estinzione
- DJI Matrice 350 RTK: il drone in volo sugli incendi di Catania